pyboard 用クイックリファレンス¶
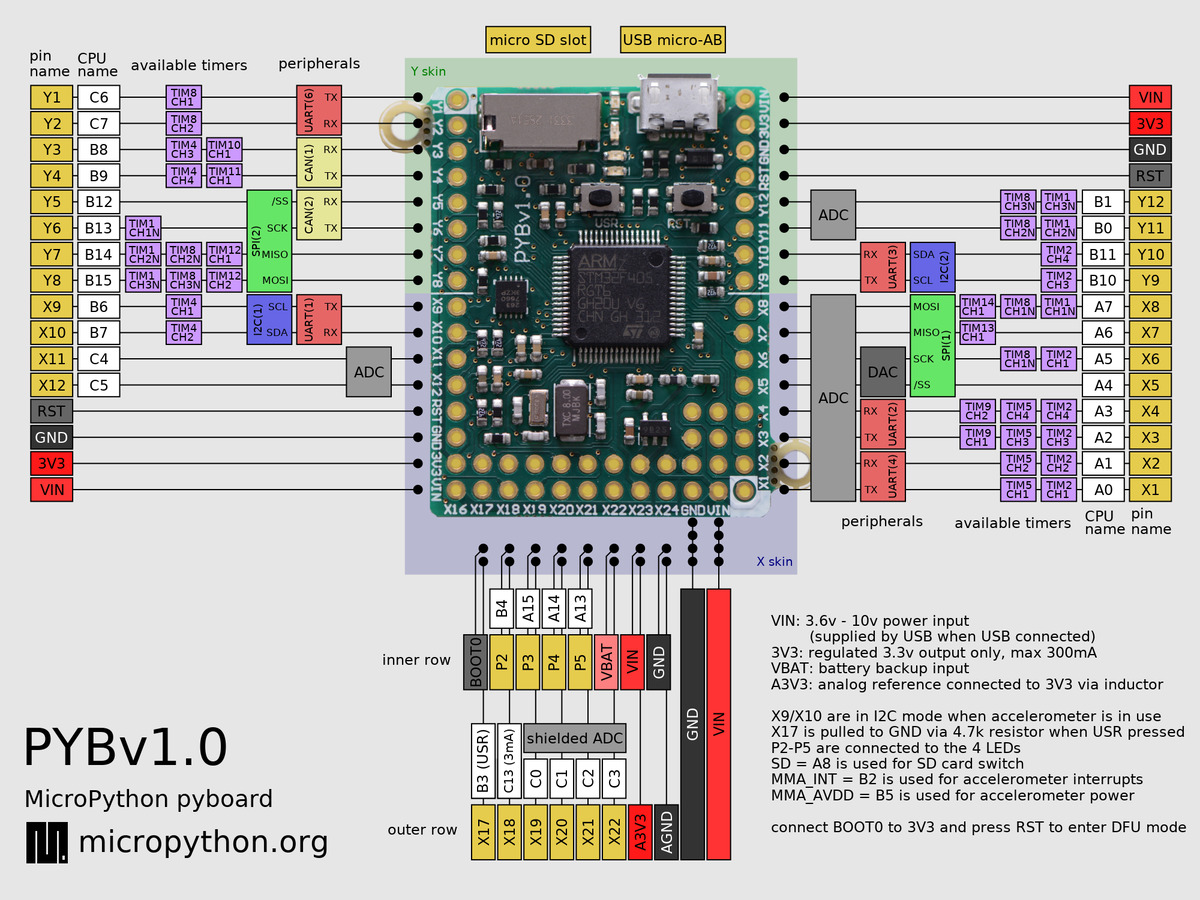
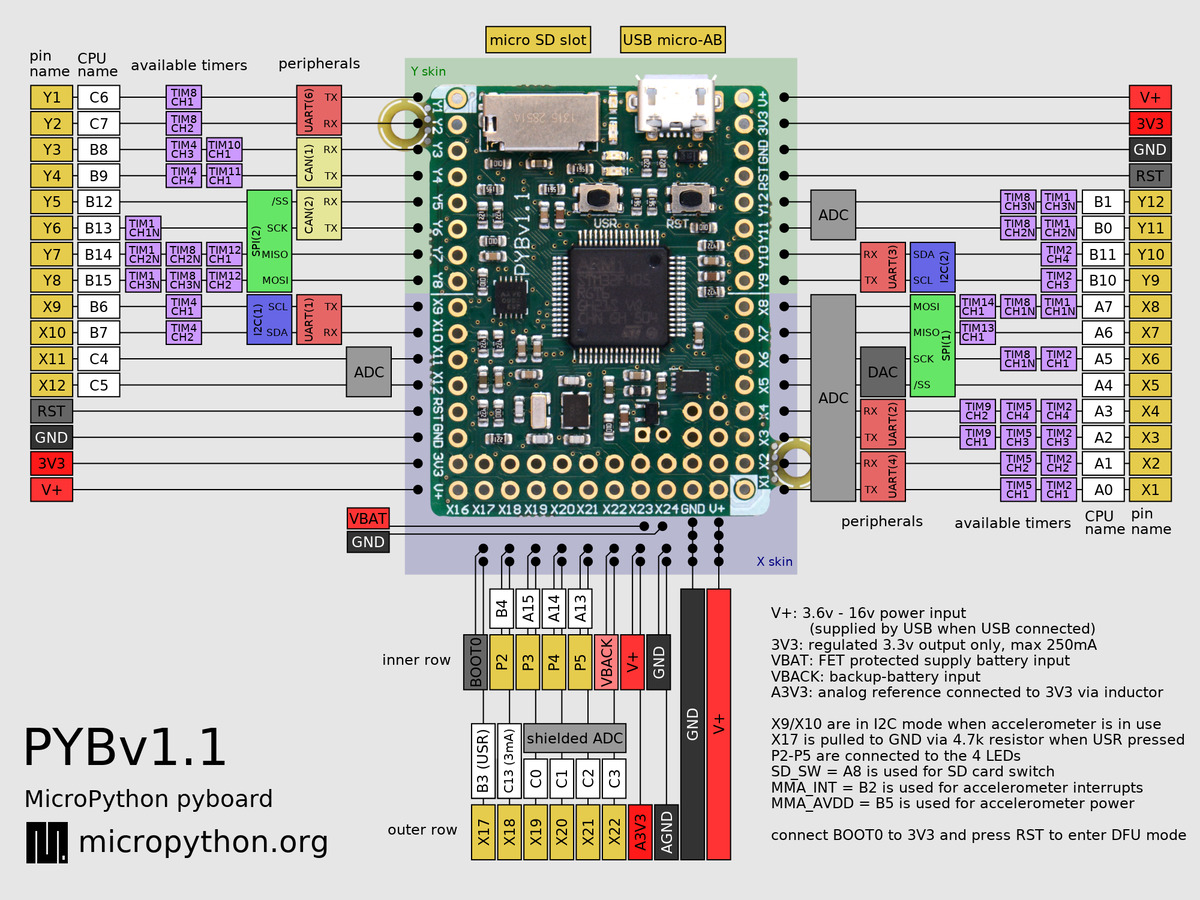
以下のピン配置は PYBv1.1 用です。pyboard の他のバージョン(PYBv1.0 、PYBLITEv1.0-AC 、PYBLITEv1.0 )のピン配置もあります。
{kind=link}
{kind=link}
{kind=link}
以下は pyboard のクイックリファレンスです。このボードを初めて使用する場合は、まず次の章を読むよう検討してください。
ボードの一般的な制御¶
モジュール pyb を参照してください:
import pyb
pyb.repl_uart(pyb.UART(1, 9600)) # REPL を UART(1) に複製
pyb.wfi() # 割込みまで CPU を一時停止します
pyb.freq() # CPU とバスの周波数を得ます
pyb.freq(60000000) # CPU の周波数を 60MHz に設定します
pyb.stop() # 外部割込みまで CPU を停止します
遅延とタイミング¶
モジュール time を使います:
import time
time.sleep(1) # 1 秒スリープします
time.sleep_ms(500) # 500 ミリ秒スリープします
time.sleep_us(10) # 10 マイクロ秒スリープします
start = time.ticks_ms() # ミリ秒カウンターの値を得ます
delta = time.ticks_diff(time.ticks_ms(), start) # 時間差を算出します
ボード上の LED¶
pyb.LED を参照:
from pyb import LED
led = LED(1) # 1=赤、2=緑、3=黄色、4=青
led.toggle()
led.on()
led.off()
# LED 3 と 4 は PWM 照度(0-255)をサポートします
LED(4).intensity() # 照度を得ます
LED(4).intensity(128) # 照度を半分に設定します
ボード上のスイッチ¶
pyb.Switch を参照:
from pyb import Switch
sw = Switch()
sw.value() # True または False を返します
sw.callback(lambda: pyb.LED(1).toggle())
ピンと GPIO¶
pyb.Pin を参照:
from pyb import Pin
p_out = Pin('X1', Pin.OUT_PP)
p_out.high()
p_out.low()
p_in = Pin('X2', Pin.IN, Pin.PULL_UP)
p_in.value() # 0 または 1 を返します
サーボ制御¶
pyb.Servo を参照:
from pyb import Servo
s1 = Servo(1) # ポジション 1 (X1, VIN, GND)のサーボ
s1.angle(45) # 45 度に回転
s1.angle(-60, 1500) # 1500ms で -60 度に回転
s1.speed(50) # 以降のサーボの回転に適用
外部割込み¶
pyb.ExtInt を参照:
from pyb import Pin, ExtInt
callback = lambda e: print("intr")
ext = ExtInt(Pin('Y1'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
タイマー¶
pyb.Timer を参照:
from pyb import Timer
tim = Timer(1, freq=1000)
tim.counter() # カウンター値を得ます
tim.freq(0.5) # 0.5 Hz
tim.callback(lambda t: pyb.LED(1).toggle())
RTC (リアルタイムクロック)¶
pyb.RTC を参照:
from pyb import RTC
rtc = RTC()
rtc.datetime((2017, 8, 23, 1, 12, 48, 0, 0)) # 指定の日時を設定します
rtc.datetime() # 日時を得ます
PWM (パルス幅変調)¶
from pyb import Pin, Timer
p = Pin('X1') # X1 は TIM2, CH1 を持ちます
tim = Timer(2, freq=1000)
ch = tim.channel(1, Timer.PWM, pin=p)
ch.pulse_width_percent(50)
ADC (アナログ-デジタル変換)¶
from pyb import Pin, ADC
adc = ADC(Pin('X19'))
adc.read() # 値 0-4095 を読み込みます
DAC (デジタル-アナログ変換)¶
from pyb import Pin, DAC
dac = DAC(Pin('X5'))
dac.write(120) # 0 から 255 の範囲で出力
UART (シリアルバス)¶
pyb.UART を参照:
from pyb import UART
uart = UART(1, 9600)
uart.write('hello')
uart.read(5) # 5 バイトまで読み込みます
SPI バス¶
pyb.SPI を参照:
from pyb import SPI
spi = SPI(1, SPI.MASTER, baudrate=200000, polarity=1, phase=0)
spi.send('hello')
spi.recv(5) # バス上で 5 バイトを受信
spi.send_recv('hello') # 5 バイトを送受信
I2C バス¶
Hardware I2C is available on the X and Y halves of the pyboard via I2C('X')
and I2C('Y'). Alternatively pass in the integer identifier of the peripheral,
eg I2C(1). Software I2C is also available by explicitly specifying the
scl and sda pins instead of the bus name. For more details see
machine.I2C.
from machine import I2C
i2c = I2C('X', freq=400000) # ハードウェア I2C オブジエクトを作成
i2c = I2C(scl='X1', sda='X2', freq=100000) # ソフトウェア I2C オブジエクトを作成
i2c.scan() # スレーブアドレスのリストを返します
i2c.writeto(0x42, 'hello') # アドレス 0x42 のスレーブに 5 バイト送信します
i2c.readfrom(0x42, 5) # スレーブから 5 バイト受信します
i2c.readfrom_mem(0x42, 0x10, 2) # スレーブ 0x42 のスレーブメモリ 0x10 から2バイト読み込みます
i2c.writeto_mem(0x42, 0x10, 'xy') # スレーブ 0x42 のスレーブメモリ 0x10 へ2バイト書き込みます
注記: 古い I2C サポートについては pyb.I2C を参照: