RP2 用クイックリファレンス
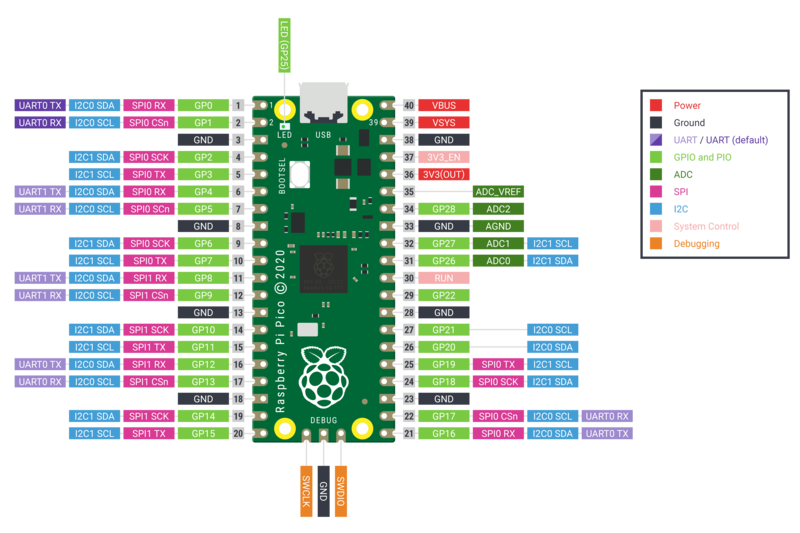
Raspberry Pi Pico 開発ボード (画像出所: Raspberry Pi 財団)。
以下は、Raspberry Pi RP2xxx ボードのためのクイックリファレンスです。このボードを初めて使う場合は、まず次のマイクロコントローラの概要を確認することを勧めます
MicroPython のインストール
チュートリアルの章: RP2xxx での MicroPython の始め方 を参照してください。そこにはトラブルシューティングについても記載されています。
ボードの一般的な制御
MicroPython REPL は USB シリアルポートで利用できます。タブ補完は、オブジェクトにどのようなメソッドがあるかを調べるのに便利です。貼り付けモード(ctrl-E)は、大きめの Pythonコードを REPL に貼り付けるのに便利です。
The machine module:
machine.freq() は MCU の周波数を変更し、UART や SPI のためのペリフェラル周波数を制御できます。使い方は次のとおりです:
machine.freq(MCU_frequency[, peripheral_frequency=48_000_000])
MCU の周波数は約 48 MHz 未満から約 250 MHz まで設定できます。起動時のデフォルトは 125 MHz です。ペリフェラル周波数は 48 MHz または MCU の周波数と同じでなければならず、デフォルトは 48 MHz です。ペリフェラル周波数が変更された場合、既存の UART や SPI のインスタンスはボーレートが変わるため、再設定が必要になる場合があります:
import machine
machine.freq() # CPU の現在の周波数を取得
machine.freq(240000000) # CPU の周波数を 240 MHz に設定し、
# UART 周波数は 48MHz のまま維持
machine.freq(125000000, 125000000) # CPU と UART の周波数を 125 MHz に設定
rp2 モジュール:
import rp2
ネットワーキング
WLAN
network モジュールの network.WLAN クラス:
import network
wlan = network.WLAN() # ステーションインタフェースを作成(デフォルト。アクセスポイントインタフェースについては後述)
wlan.active(True) # インタフェースをアクティブ化
wlan.scan() # アクセスポイントをスキャン
wlan.isconnected() # ステーションが AP に繋がったかをチェック
wlan.connect('ssid', 'key') # AP に接続
wlan.config('mac') # インタフェースの MAC アドレスを取得
wlan.ipconfig('addr4') # インタフェースの IPv4 アドレスを取得
ap = network.WLAN(network.WLAN.IF_AP) # アクセスポイントインタフェースを作成
ap.config(ssid='RP2-AP') # アクセスポイントの SSID を設定
ap.config(max_clients=10) # ネットワークに接続できるクライアント数を設定
ap.active(True) # インタフェースをアクティブ化
ローカルの WiFi ネットワークに接続するには、次の関数を流用してください:
def do_connect():
import machine, network
wlan = network.WLAN()
wlan.active(True)
if not wlan.isconnected():
print('connecting to network...')
wlan.connect('ssid', 'key')
while not wlan.isconnected():
machine.idle()
print('network config:', wlan.ipconfig('addr4'))
ネットワークが確立されると socket モジュールを使って、通常どおり TCP/UDP ソケットを作成して使用できます。HTTP リクエストするには requests モジュールを使うと便利です。
wlan.connect() を呼んだ後、認証に失敗した場合やAPが範囲内にない場合でも、デバイスはデフォルトで 永遠 に接続を再試行します。 この状態で wlan.status() は、接続が成功するかインターフェースが無効になるまで、 network.STAT_CONNECTING を返します。
遅延とタイミング
time モジュールを使います:
import time
time.sleep(1) # 1秒間、一時停止する
time.sleep_ms(500) # 500ミリ秒間、一時停止する
time.sleep_us(10) # 10マイクロ秒間、一時停止する
start = time.ticks_ms() # ミリ秒カウンター値を取得
delta = time.ticks_diff(time.ticks_ms(), start) # 時差を計算
タイマー
RP2040 のシステムタイマペリフェラルは、グローバルなマイクロ秒のタイムベースを提供し、そのための割り込みを生成します。現在、ソフトウェアタイマが利用可能であり、その数は(メモリが許す限り)無制限です。タイマーID (現時点では id=1 がサポートされています)を指定する必要は無く、デフォルトで指定されます。
machine.Timer クラスを使います:
from machine import Timer
tim = Timer(period=5000, mode=Timer.ONE_SHOT, callback=lambda t:print(1))
tim.init(period=2000, mode=Timer.PERIODIC, callback=lambda t:print(2))
デフォルトでは、タイマーコールバックはソフト IRQ (割り込み)として実行されるため、メモリ割り当ては可能ですが、ガーベジコレクション(GC)によるジッターや遅延の影響を受けやすくなります。 Timer() コンストラクタまたは init() メソッドに hard=True を渡すことで、コールバックをハード IRQ コンテキストで実行するように設定できます。これにより遅延やジッターが軽減されますが、ハード IRQ ハンドラに適用される制約については 割り込みハンドラの作成 を参照してください。
ピンと GPIO
machine.Pin クラスを使います:
from machine import Pin
p0 = Pin(0, Pin.OUT) # GPIO 0 の出力ピンを作成
p0.on() # ピンを "on" (high) レベルに設定
p0.off() # ピンを "off" (low) レベルに設定
p0.value(1) # ピンを on/high に設定
p2 = Pin(2, Pin.IN) # GPIO 2 の入力ピンを作成
print(p2.value()) # 値 0 または 1 を取得
p4 = Pin(4, Pin.IN, Pin.PULL_UP) # 内部プルアップ抵抗を有効化
p5 = Pin(5, Pin.OUT, value=1) # 作成時にピンを high に設定
プログラマブル IO (PIO)
PIO は低レベルの IO インターフェースを一から構築するのに便利です。アセンブリ命令の詳細な説明については rp2 モジュールを参照してください。
PIO を使って 1Hz で LED を点滅させる例:
from machine import Pin
import rp2
@rp2.asm_pio(set_init=rp2.PIO.OUT_LOW)
def blink_1hz():
# 周期: 1 + 7 + 32 * (30 + 1) = 1000
set(pins, 1)
set(x, 31) [6]
label("delay_high")
nop() [29]
jmp(x_dec, "delay_high")
# 周期: 1 + 7 + 32 * (30 + 1) = 1000
set(pins, 0)
set(x, 31) [6]
label("delay_low")
nop() [29]
jmp(x_dec, "delay_low")
# Pin(25) に出力する blink_1hz の StateMachine を作成/始動
sm = rp2.StateMachine(0, blink_1hz, freq=2000, set_base=Pin(25))
sm.active(1)
UART (シリアルバス)
UART0 と UART1 の2つの UART があります。UART0 は GPIO 0/1、12/13、16/17 にUART1 は GPIO 4/5、8/9 にマッピングできます。
machine.UART を参照
from machine import UART, Pin
uart1 = UART(1, baudrate=9600, tx=Pin(4), rx=Pin(5))
uart1.write('hello') # 5バイト書き出す
uart1.read(5) # 5バイトまで読み込む
注釈
REPL over UART はデフォルトで無効になっています。REPL over UART を有効にする方法については RP2xxx での MicroPython の始め方 を参照してください。
PWM (パルス幅変調)
8つの独立した PWM ジェネレータ(スライス)があり、それぞれに2つのチャネルがあります。これにより、合計で16個のPWMチャネルが利用できます。これらのチャネルは、machine.freq() が 125Mhz の場合、8Hzから62.5Mhzまでのクロックを持てます。スライスの2つのチャネルは同じ周波数で動作しますが、異なるデューティ比を持てます。通常、2つのチャネルは隣接する GPIO ピンのペアに偶数/奇数の番号で割り当てられます。たとえば、GPIO0 と GPIO1 はスライス0にあり、GPIO2 と GPIO3 はスライス1にあります。特定のチャネルは異なる GPIO ピンに割り当てることもできます(Pinout を参照)。たとえば、スライス0のチャネルAは GPIO0 と GPIO16 の両方に割り当てることができます。
machine.PWM クラスを使います:
from machine import Pin, PWM
# ピンから PWM オブジェクトを作成し、スライス0の周波数と
# チャンネルAのデューティ比を設定
pwm0 = PWM(Pin(0), freq=2000, duty_u16=32768)
pwm0.freq() # スライス0の現在の周波数を取得
pwm0.freq(1000) # スライス0の周波数を設定/変更
pwm0.duty_u16() # チャンネルAの現在のデューティ比を取得(0-65535 の範囲)
pwm0.duty_u16(200) # チャンネルAのデューティ比を設定(0-65535 の範囲)
pwm0.duty_u16(0) # チャンネルAの出力を停止
print(pwm0) # PWM オブジェクトのプロパティを表示
pwm0.deinit() # スライス0の PWM を無効化し、チャンネルAとBを停止
ADC (アナログ/デジタル変換)
RP2040 には合計5つの ADC チャンネルがあり、そのうちの4つ(GP26, GP27, GP28, GP29)は 12 ビットの SAR ベースの ADC です。ADC0, ADC1, ADC2, ADC3 の入力信号は,それぞれ GP26, GP27, GP28, GP29 に接続できます(Pico 基板では GP29 は VSYS に接続)。標準的な ADC のレンジは 0-3.3V です。5チャンネル目は内蔵の温度センサに接続されており、温度の測定に使えます。
machine.ADC クラスを使ってください:
from machine import ADC, Pin
adc = ADC(Pin(26)) # ADC ピンの ADC オブジェクトを作成
adc.read_u16() # 0.0v - 3.3v 範囲を 0-65535 の値で読込み
コンストラクタ ADC の引数には、ピン番号、ピン名、Pin オブジェクトの名前、0から3の範囲のチャンネル番号、内部温度センサー用のADC.CORE_TEMPのいずれかを指定します。ピンが指定された場合、そのピンは高インピーダンス(high-Z)モードで初期化されます。チャンネル番号を指定した場合、ピンは初期化されず、設定はユーザーコードに任されます。ハードリセット後、RP2040のピンは最大電流(シンク電流)が約60µAのモードで動作します。ピンが他に設定されていない場合、これが原因でADCの読み取りが誤ってしまう可能性があります。
ソフトウェア SPI バス
ソフトウェア SPI (ビットバンギング)はすべてのピンで動作し、 machine.SoftSPI クラスを介してアクセスします:
from machine import Pin, SoftSPI
# 与えたピンから SoftSPI バスを構築
# 極性 polarity は SCK のアイドル状態
# phase=0 は SCK の第1エッジでサンプルを意味、chase=1 は第2を意味
spi = SoftSPI(baudrate=100_000, polarity=1, phase=0, sck=Pin(0), mosi=Pin(2), miso=Pin(4))
spi.init(baudrate=200000) # ボーレートを設定
spi.read(10) # MISO で 10 バイト読込み
spi.read(10, 0xff) # 10 バイト読込み、その間 MOSI に 0xff を出力
buf = bytearray(50) # バッファを作成
spi.readinto(buf) # 与えたバッファに読込み(この場合は 50 バイト)
spi.readinto(buf, 0xff) # 与えたバッファに読込み、MOSI に 0xff を出力
spi.write(b'12345') # MOSI に 5 バイト書込み
buf = bytearray(4) # バッファを作成
spi.write_readinto(b'1234', buf) # MOSI に書き込み、MISO からバッファに読み込み
spi.write_readinto(buf, buf) # MOSI に buf を書き込み、MISO から buf に読み込み
警告
現在のところ、ソフトウェア SPI を初期化するときには sck, mosi, miso すべて を指定しなければなりません。
ハードウェア SPI バス
RP2040 には machine.SPI クラスを使ってアクセスできる2つのハードウェア SPI があり、先のソフトウェア API と同じメソッドが使えます:
from machine import Pin, SPI
spi = SPI(1, 10_000_000) # Default assignment: sck=Pin(10), mosi=Pin(11), miso=Pin(8)
spi = SPI(1, 10_000_000, sck=Pin(14), mosi=Pin(15), miso=Pin(12))
spi = SPI(0, baudrate=80_000_000, polarity=0, phase=0, bits=8, sck=Pin(6), mosi=Pin(7), miso=Pin(4))
ソフトウェア I2C バス
ソフトウェア I2C (ビット・バンギングを使用)は、出力可能なすべてのピンで動作し、 machine.SoftI2C クラスを使ってアクセスします。
from machine import Pin, SoftI2C
i2c = SoftI2C(scl=Pin(5), sda=Pin(4), freq=100_000)
i2c.scan() # デバイスをスキャン
i2c.readfrom(0x3a, 4) # アドレス 0x3a のデバイスから 4 バイト読み込み
i2c.writeto(0x3a, '12') # アドレス 0x3a のデバイスに '12' を書き込み
buf = bytearray(10) # 10バイトのバッファを作成
i2c.writeto(0x3a, buf) # 与えたバッファをペリフェラルに書き込み
ハードウェア I2C バス
ハードウェア I2C には machine.I2C クラスを使ってアクセスしますこのクラスには先述のソフトウェア I2C と同じメソッドがあります:
from machine import Pin, I2C
i2c = I2C(0) # Pico でのデフォルトの割当て: scl=Pin(5), sda=Pin(4)
i2c = I2C(1, scl=Pin(3), sda=Pin(2), freq=400_000)
I2S バス
machine.I2S を参照:
from machine import I2S, Pin
i2s = I2S(0, sck=Pin(16), ws=Pin(17), sd=Pin(18), mode=I2S.TX, bits=16, format=I2S.STEREO, rate=44100, ibuf=40000) # create I2S object
i2s.write(buf) # オーディオサンプルのバッファを I2S デバイスに書き込む
i2s = I2S(1, sck=Pin(0), ws=Pin(1), sd=Pin(2), mode=I2S.RX, bits=16, format=I2S.MONO, rate=22050, ibuf=40000) # I2S オブジェクトの作成
i2s.readinto(buf) # I2S デバイスからのオーディオサンプルでバッファを埋める
ws のピン番号は sck のピン番号よりも1つ大きくなければなりません。
I2S クラスは、現在のところ技術プレビューとして提供しています。プレビュー期間中、ユーザーの皆様からのフィードバックをお待ちしています。このフィードバックに基づいて、I2S クラスの API と実装が変更される可能性があります。
2つのI2Sバス、id=0 と id=1 がサポートされています。
リアルタイムクロック (RTC)
machine.RTC を参照:
from machine import RTC
rtc = RTC()
rtc.datetime((2017, 8, 23, 0, 1, 12, 48, 0)) # 指定の日時を設定
# 2017/8/23 1:12:48
# 曜日の値は無視される
rtc.datetime() # 日時を取得
WDT (ウォッチドッグタイマー)
RP2040 にはカウントダウンタイマーであるウォッチドッグが搭載されており、これがゼロになるとチップの一部を再起動できます。
machine.WDT を参照:
from machine import WDT
# WDT を有効化し、タイムアウトを 5s に設定(最低値は 1s)
wdt = WDT(timeout=5000)
wdt.feed()
タイムアウトの最大値は 8388 ms です。
OneWire ドライバー
OneWire ドライバーはソフトウェアで実装され、すべてのピンで動作します:
from machine import Pin
import onewire
ow = onewire.OneWire(Pin(12)) # GPIO 12 で OneWire バスを作成
ow.scan() # バス上のデバイスリストをスキャン
ow.reset() # バスをリセット
ow.readbyte() # 1バイト読込み
ow.writebyte(0x12) # バスに1バイト書込み
ow.write('123') # バスに複数バイト書込み
ow.select_rom(b'12345678') # ROM コードで指定したデバイスを選択
DS18S20 と DS18B20 デバイス用の特定のドライバーがあります:
import time, ds18x20
ds = ds18x20.DS18X20(ow)
roms = ds.scan()
ds.convert_temp()
time.sleep_ms(750)
for rom in roms:
print(ds.read_temp(rom))
4.7k のプルアップ抵抗をデータラインに接続してください。convert_temp() メソッドは、温度をサンプリングするたびに呼び出す必要があることに注意してください。
NeoPixel/APA106 ドライバー
neopixel と apa106 モジュールを使います(訳注: 今のところ apa106 モジュールは rp2 でサポートされていません):
from machine import Pin
from neopixel import NeoPixel
pin = Pin(0, Pin.OUT) # NeoPixel 駆動のための GPIO 0 を出力に設定
np = NeoPixel(pin, 8) # 8ピクセル用の NeoPixel ドライバーを GPIO 0 で作成
np[0] = (255, 255, 255) # 第1ピクセルを白に設定
np.write() # 全ピクセルにデータ書込み
r, g, b = np[0] # 第1ピクセルの色を取得
APA106 ドライバーは NeoPixel を継承していますが、内部的には異なる色順を使っています:
from apa106 import APA106
ap = APA106(pin, 8)
r, g, b = ap[0]
APA102 (DotStar)はクロック端子が追加されているため、別のドライバーを使います。