pyboard 用クイックリファレンス
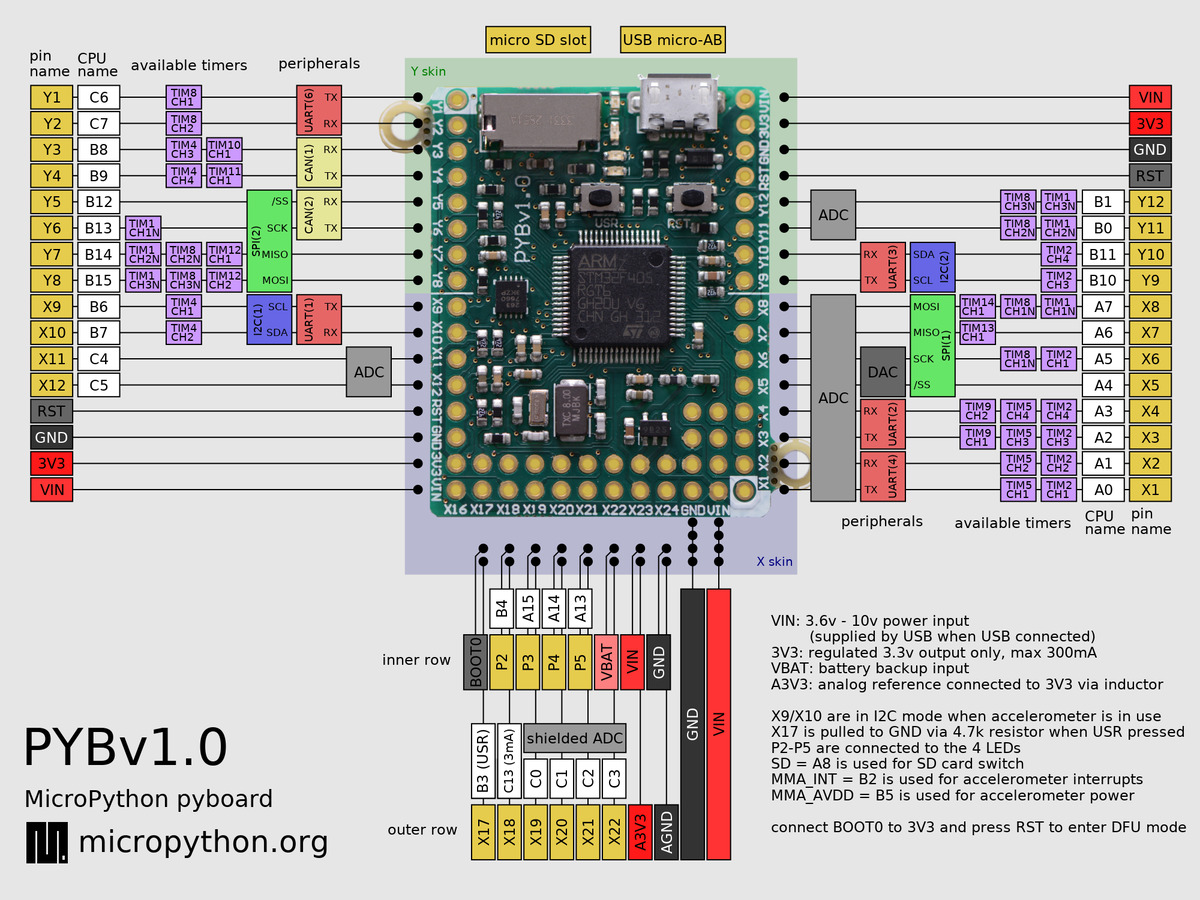
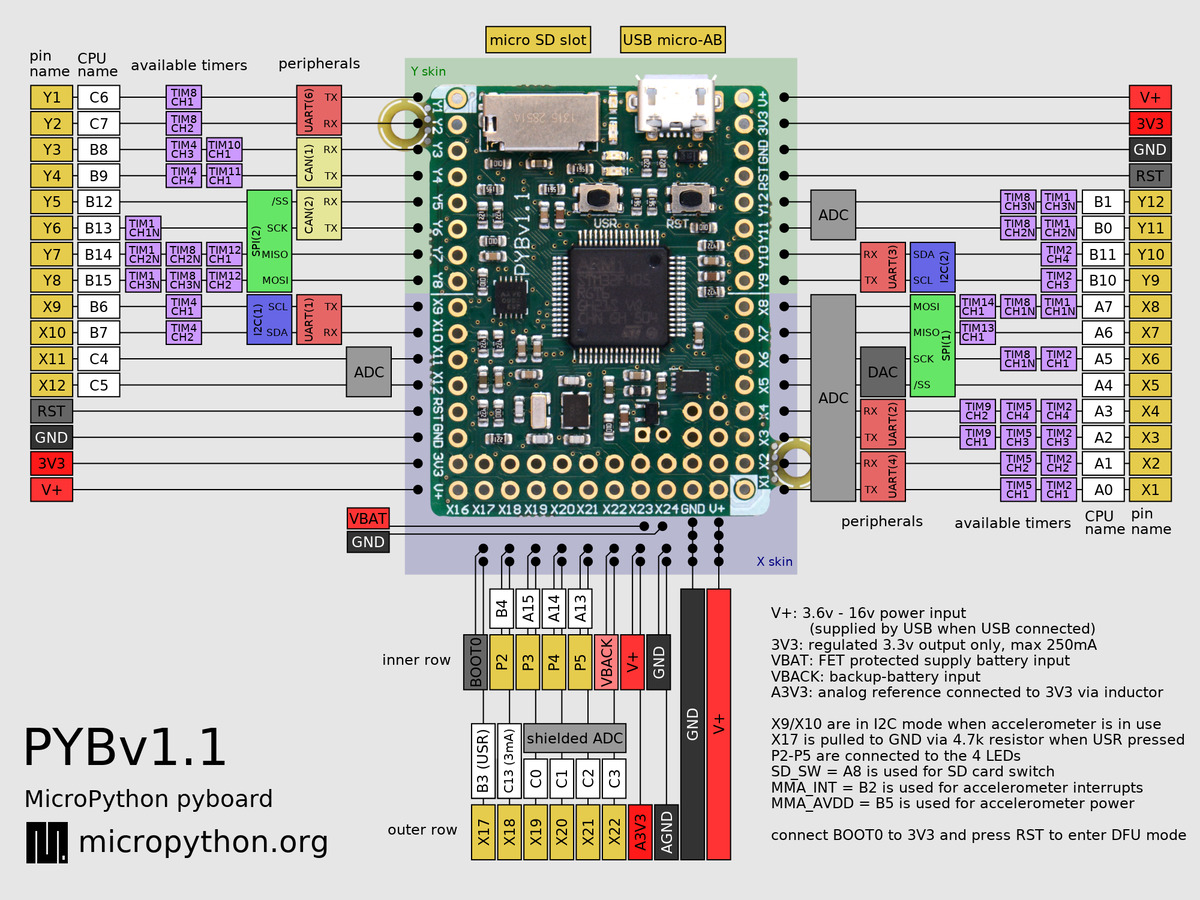
以下のピン配置は PYBv1.1 用です。pyboard の他のバージョン(PYBv1.0 、PYBLITEv1.0-AC 、PYBLITEv1.0 )のピン配置もあります。
{kind=link}
{kind=link}
{kind=link}
以下は pyboard のクイックリファレンスです。このボードを初めて使用する場合は、まず次の章を読むよう検討してください。
ボードの一般的な制御
モジュール pyb を参照してください:
import pyb
pyb.repl_uart(pyb.UART(1, 9600)) # REPL を UART(1) に複製
pyb.wfi() # 割込みまで CPU を一時停止します
pyb.freq() # CPU とバスの周波数を得ます
pyb.freq(60000000) # CPU の周波数を 60MHz に設定します
pyb.stop() # 外部割込みまで CPU を停止します
遅延とタイミング
モジュール time を使います:
import time
time.sleep(1) # 1 秒スリープします
time.sleep_ms(500) # 500 ミリ秒スリープします
time.sleep_us(10) # 10 マイクロ秒スリープします
start = time.ticks_ms() # ミリ秒カウンターの値を得ます
delta = time.ticks_diff(time.ticks_ms(), start) # 時間差を算出します
ボード上の LED
pyb.LED を参照:
from pyb import LED
led = LED(1) # 1=赤、2=緑、3=黄色、4=青
led.toggle()
led.on()
led.off()
# LED 3 と 4 は PWM 照度(0-255)をサポートします
LED(4).intensity() # 照度を得ます
LED(4).intensity(128) # 照度を半分に設定します
ボード上のスイッチ
pyb.Switch を参照:
from pyb import Switch
sw = Switch()
sw.value() # True または False を返します
sw.callback(lambda: pyb.LED(1).toggle())
ピンと GPIO
pyb.Pin を参照:
from pyb import Pin
p_out = Pin('X1', Pin.OUT_PP)
p_out.high()
p_out.low()
p_in = Pin('X2', Pin.IN, Pin.PULL_UP)
p_in.value() # 0 または 1 を返します
サーボ制御
pyb.Servo を参照:
from pyb import Servo
s1 = Servo(1) # ポジション 1 (X1, VIN, GND)のサーボ
s1.angle(45) # 45 度に回転
s1.angle(-60, 1500) # 1500ms で -60 度に回転
s1.speed(50) # 以降のサーボの回転に適用
外部割込み
pyb.ExtInt を参照:
from pyb import Pin, ExtInt
callback = lambda e: print("intr")
ext = ExtInt(Pin('Y1'), ExtInt.IRQ_RISING, Pin.PULL_NONE, callback)
タイマー
pyb.Timer を参照:
from pyb import Timer
tim = Timer(1, freq=1000)
tim.counter() # カウンター値を得ます
tim.freq(0.5) # 0.5 Hz
tim.callback(lambda t: pyb.LED(1).toggle())
RTC (リアルタイムクロック)
pyb.RTC を参照:
from pyb import RTC
rtc = RTC()
rtc.datetime((2017, 8, 23, 0, 1, 12, 48, 0)) # 指定の日時を設定
# 2017/8/23 1:12:48
# 曜日の値は無視される
rtc.datetime() # 日時を得ます
PWM (パルス幅変調)
from pyb import Pin, Timer
p = Pin('X1') # X1 は TIM2, CH1 を持ちます
tim = Timer(2, freq=1000)
ch = tim.channel(1, Timer.PWM, pin=p)
ch.pulse_width_percent(50)
ADC (アナログ-デジタル変換)
from pyb import Pin, ADC
adc = ADC(Pin('X19'))
adc.read() # 値 0-4095 を読み込みます
DAC (デジタル-アナログ変換)
from pyb import Pin, DAC
dac = DAC(Pin('X5'))
dac.write(120) # 0 から 255 の範囲で出力
UART (シリアルバス)
pyb.UART を参照:
from pyb import UART
uart = UART(1, 9600)
uart.write('hello')
uart.read(5) # 5 バイトまで読み込みます
SPI バス
pyb.SPI を参照:
from pyb import SPI
spi = SPI(1, SPI.CONTROLLER, baudrate=200000, polarity=1, phase=0)
spi.send('hello')
spi.recv(5) # バス上で 5 バイトを受信
spi.send_recv('hello') # 5 バイトを送受信
I2C バス
ハードウェア I2C は I2C('X') と I2C('Y') で pyboard の X と Y の半分で利用できます。あるいは、ペリフェラルの整数識別子、たとえば I2C(1) を渡します。バス名の代わりに scl と sda ピンを明示的に指定することにより、ソフトウェア I2C も利用できます。詳細については machine.I2C を参照してください。
from machine import I2C
i2c = I2C('X', freq=400000) # ハードウェア I2C オブジエクトを作成
i2c = I2C(scl='X1', sda='X2', freq=100000) # ソフトウェア I2C オブジエクトを作成
i2c.scan() # ペリフェラルアドレスのリストを返します
i2c.writeto(0x42, 'hello') # アドレス 0x42 のペリフェラルに 5 バイト送信します
i2c.readfrom(0x42, 5) # ペリフェラルから 5 バイト受信します
i2c.readfrom_mem(0x42, 0x10, 2) # ペリフェラル 0x42 のスレーブメモリ 0x10 から2バイト読み込みます
i2c.writeto_mem(0x42, 0x10, 'xy') # ペリフェラル 0x42 のスレーブメモリ 0x10 へ2バイト書き込みます
注記: 古い I2C サポートについては pyb.I2C を参照:
I2S バス
machine.I2S を参照。
from machine import I2S, Pin
i2s = I2S(2, sck=Pin('Y6'), ws=Pin('Y5'), sd=Pin('Y8'), mode=I2S.TX, bits=16, format=I2S.STEREO, rate=44100, ibuf=40000) # create I2S object
i2s.write(buf) # オーディオサンプルのバッファを I2S デバイスに書き出す
i2s = I2S(1, sck=Pin('X5'), ws=Pin('X6'), sd=Pin('Y4'), mode=I2S.RX, bits=16, format=I2S.MONO, rate=22050, ibuf=40000) # create I2S object
i2s.readinto(buf) # I2S デバイスからのオーディオサンプルをバッファに読み込む
I2S クラスは現在、テクニカルプレビューとして利用できます。プレビュー期間中は、ユーザーからのフィードバックを歓迎します。このフィードバックに基づいて、I2S クラス API と実装が変更される可能性があります。
PYBv1.0/v1.1 には1つの I2S バス、id=2 があります。PYBD-SFxW には2つの I2S バス、id=1 と id=2 があります。I2S は SPI と共有されます。
CAN バス (Controller Area Network)
pyb.CAN を参照:
from pyb import CAN
can = CAN(1, CAN.LOOPBACK)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126))
can.send('message!', 123) # id 123 でメッセージを送信
can.recv(0) # FIFO 0 でメッセージを受信
ボード上の加速度センサー
pyb.Accel を参照:
from pyb import Accel
accel = Accel()
print(accel.x(), accel.y(), accel.z(), accel.tilt())